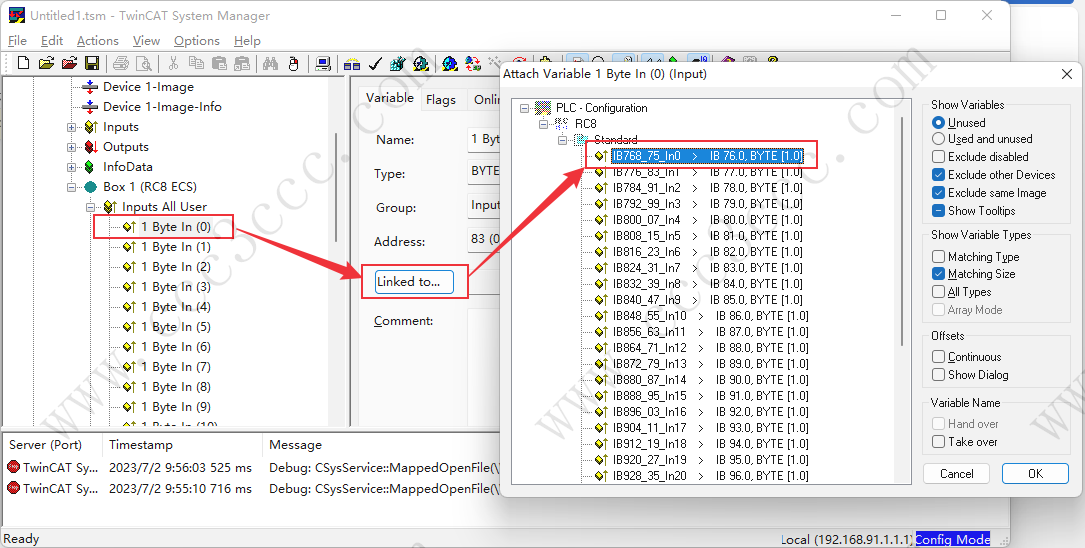
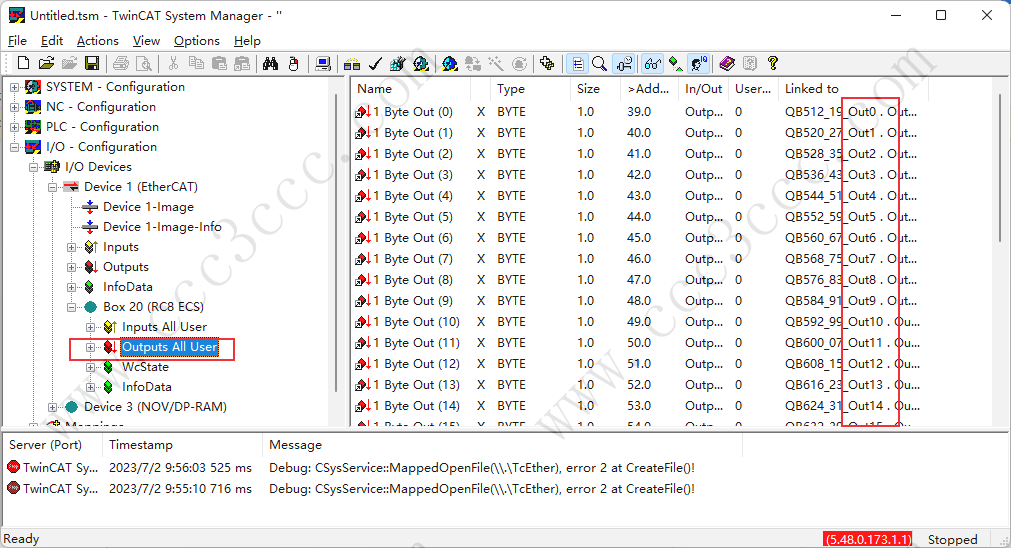
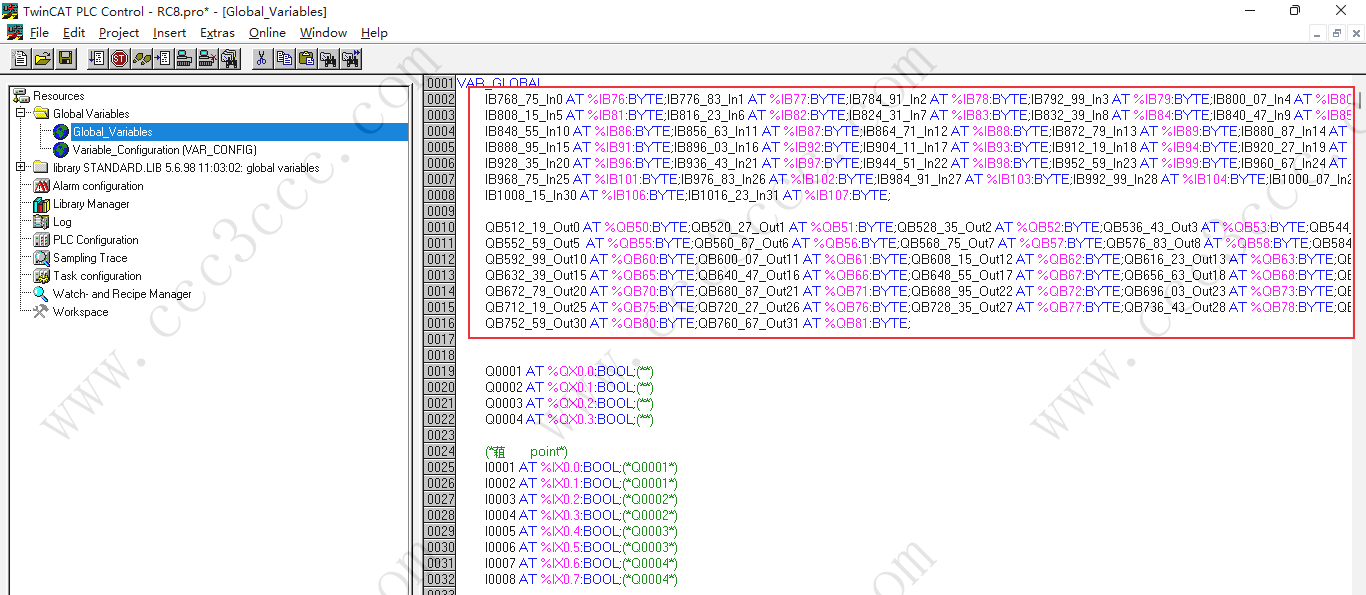
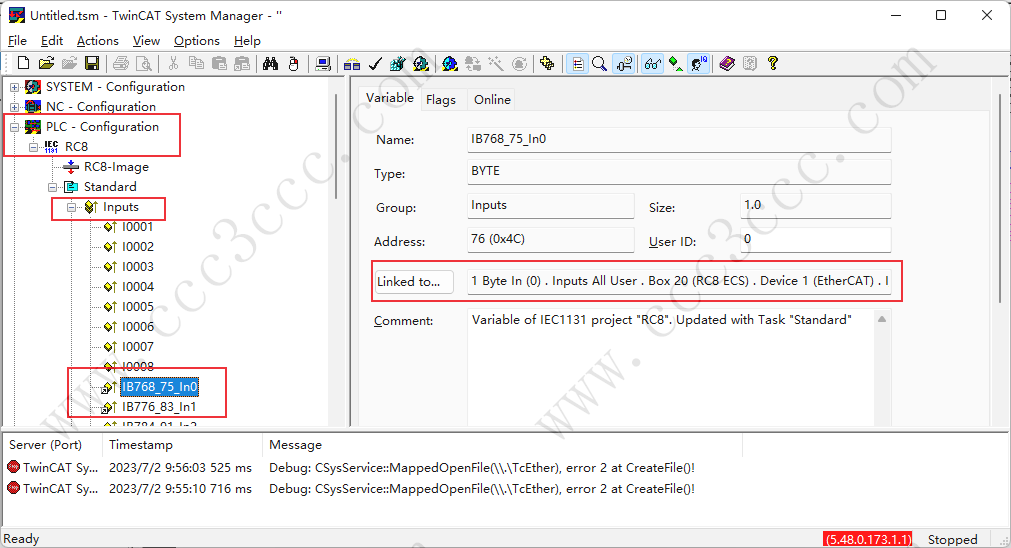
根据第三节中的Inputs All User和Outputs All User中变量的个数和类型在倍福TwinCAT PLC Control中建相对应的输入输出变量,同时又因为看CR8的变量分配(下图),输入是从512开始,为了方便对应看起来直观,在倍福里建输出变量就从QB512_19_Out0开始建(512就对应QB512_19_Out0.00,513就对应QB512_19_Out0.01,520就对应QB520_27_Out1.00),建输入变也是同样的道理,就从IB768_75_In0开始建(768就对应IB768_75_In0.00,769就对应IB768_75_In0.01,776就对应IB776_83_In1.00)